

ABOUT
テクノドライブについて
テクノドライブは、創業以来5相ステッピングモータドライバのメーカーとして、
マイクロステッピングを紹介するなど、常に業界のリーダーとして
ドライブシステムの拡充に努めてまいりました。
SERVICE
事業内容
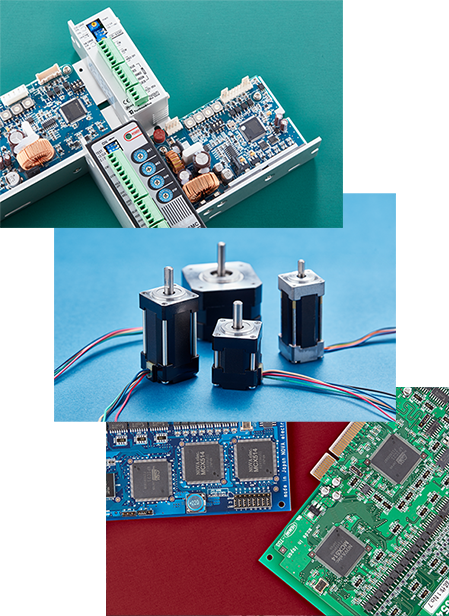
モーションコントロール
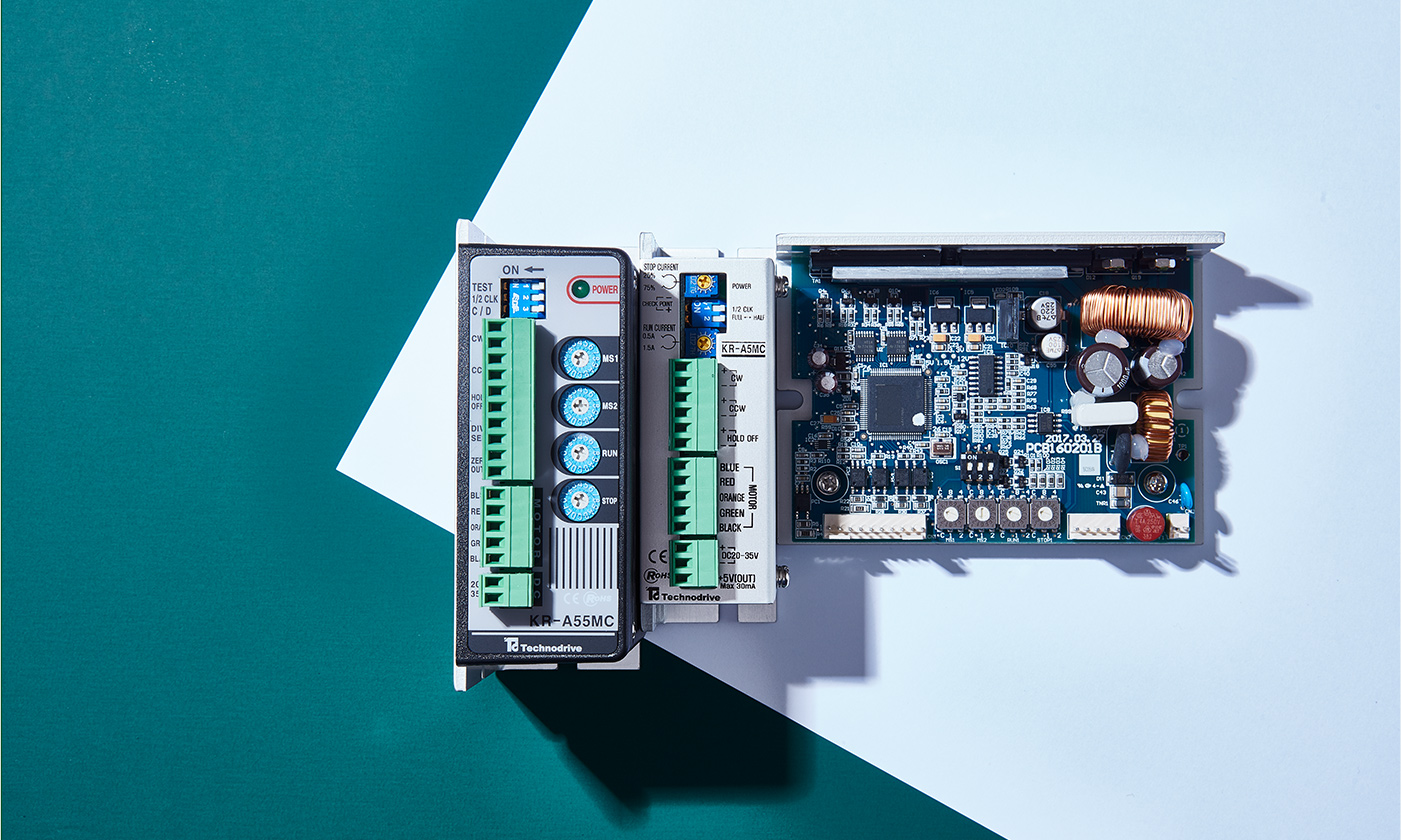
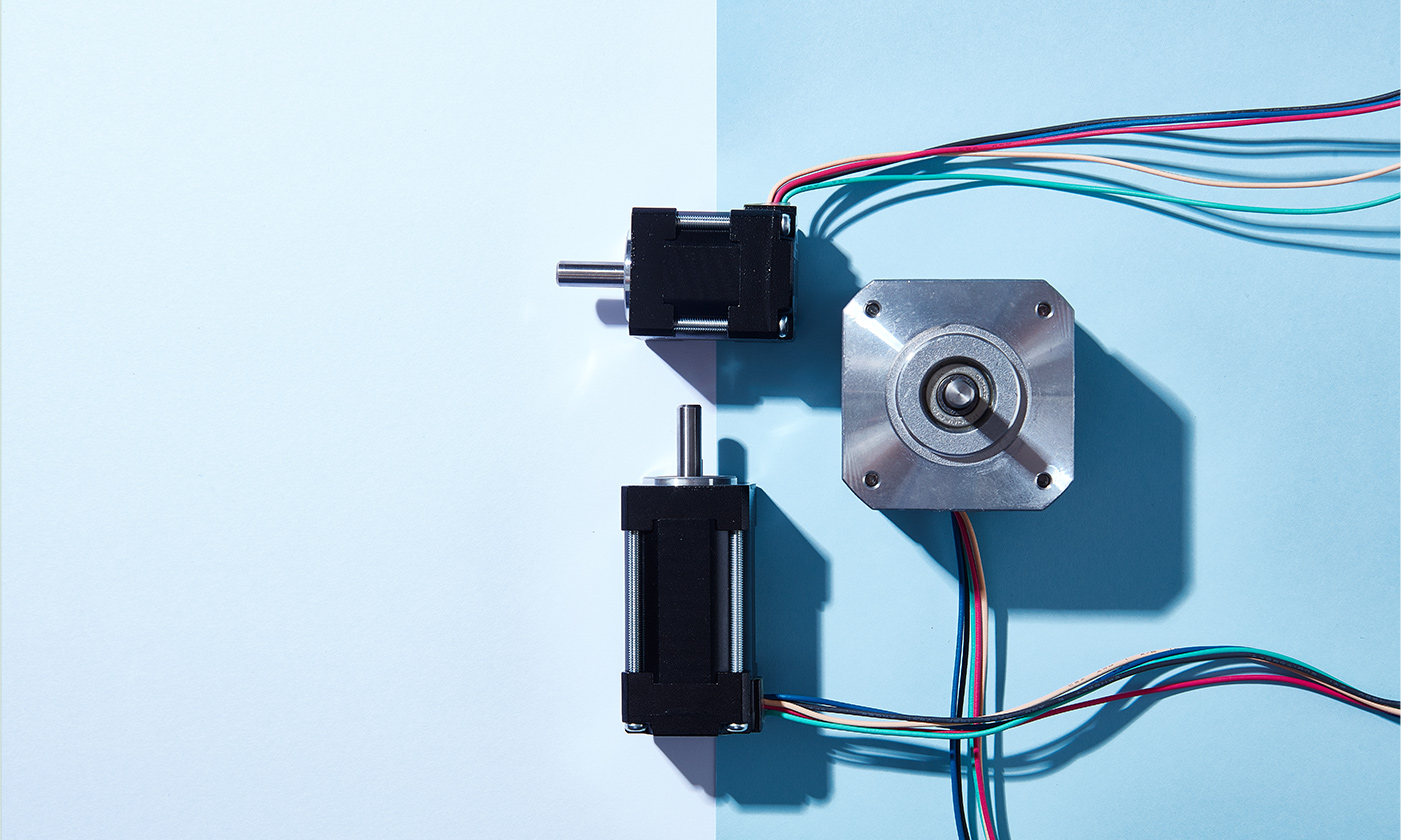
5相バイポーラモータを駆動するドライバは、AC電源用/DC電源用、フル・ハーフステップ/マイクロステップ、ケースタイプ/基板タイプなどバラエティに富み、小型ながら超低振動で正確な位置決めを実現します。モータは、20mm角からパワフルな60mm角まで取り揃えています。
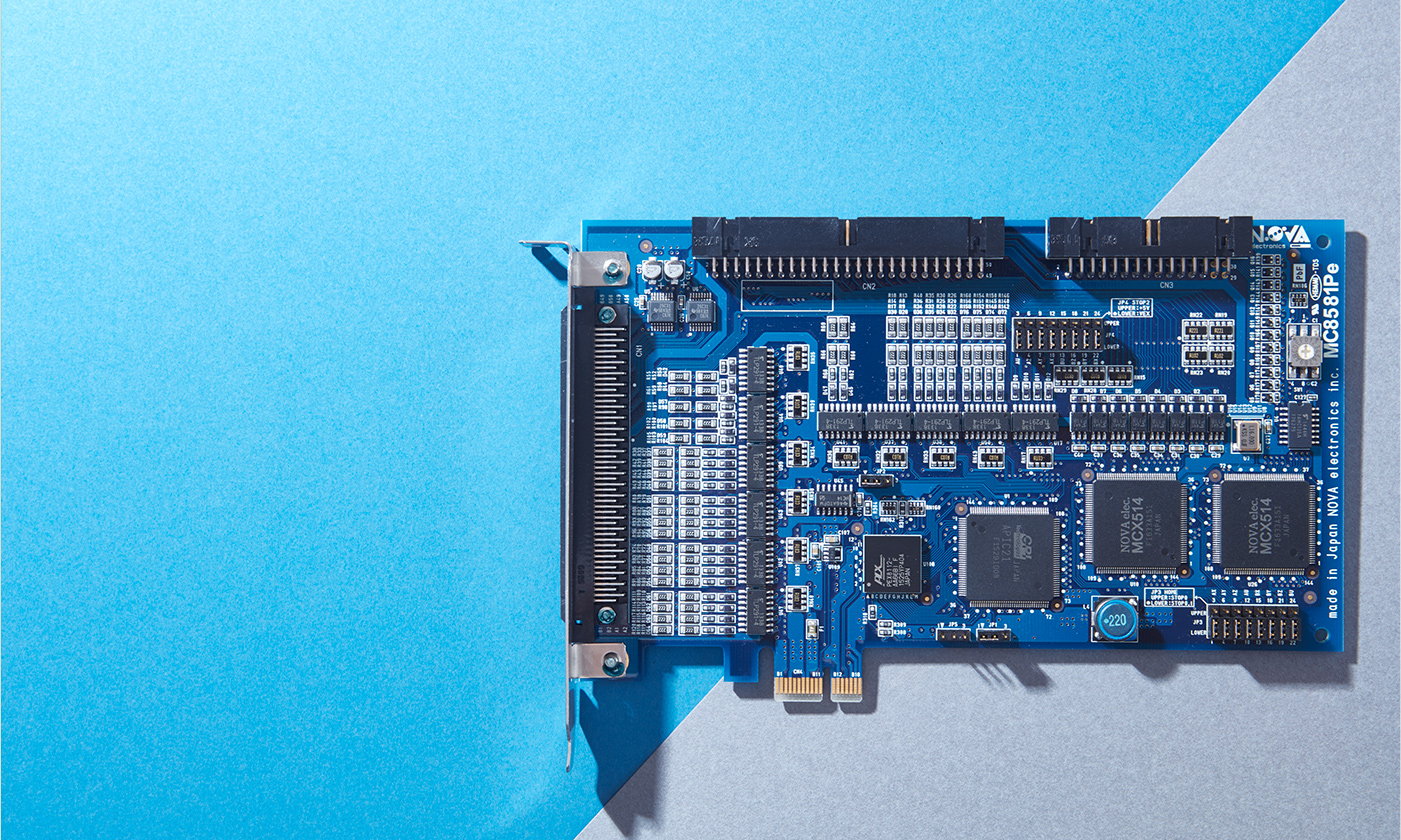
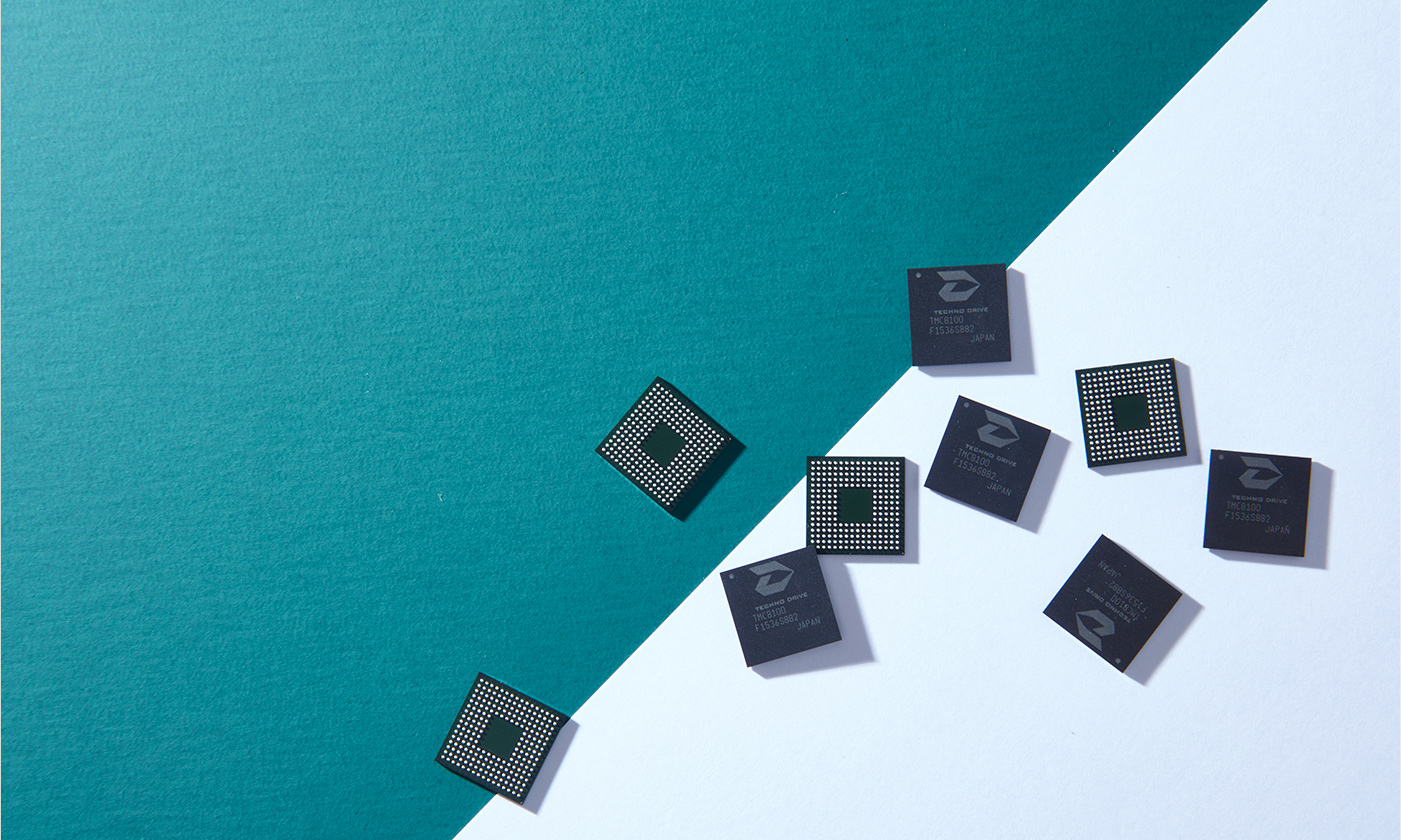
テクノドライブのモーションコントローラは、ケースタイプの1軸及び2軸プログラマブルコントローラを始めとして、多彩な補間機能を揃えた4軸、8軸のボードタイプも取り揃えています。 また先端機能を搭載したコントロールIC(LSI)も、1軸、2軸、4軸、更に小型化・低コスト化を実現したBGAタイプもあります。

海外事業
中国・東南アジアなどの発展途上市場を中心に、量産効率向上と品質安定のための位置決めシステムを提案しています。
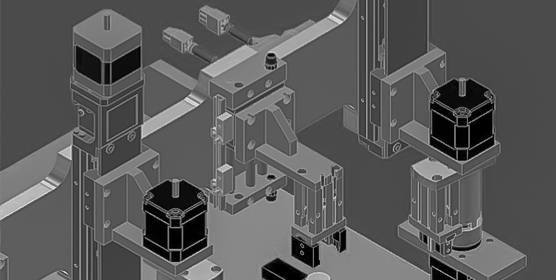
自動化促進事業
長年培ってきた位置決めシステムのノウハウを活かし、用途に最適な自動化設備のご提案をいたします。
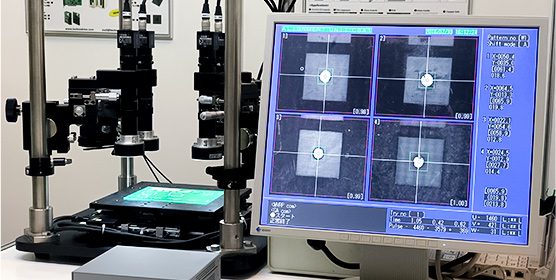
アライメントシステム/オートフォーカスシステム
光学検査機器、タッチパネルスクリーン印刷機などのビジョンシステムを最適化する自動アライメントシステムを提案しています。
販売代理店事業
市場の急速なグローバル化の流れの中で、アジアと欧米のテクノロジーと文化をつなぎ、新たなビジネスの創成をお手伝いいたします。
isel Germany AG
リニアガイド、リニアスライダー、リニアモータ、スピンドルモータ、CNC 工作機
Wingtone Industrial
精密冷間鍛造部品
COMPANY
会社案内
会社概要
| 会社名 | 株式会社 テクノドライブ |
|---|---|
| 代表取締役 | 木代 哲誌 |
| 資本金 | 20,000,000 円 |
| 設立 | 1993年5月 |
| TEL/FAX | 044-281-3555 / 044-281-3444 |
| 住所 | 神奈川県川崎市多摩区栗谷3-1-1 井田ビル1階 |
INFORMATION
お知らせ
- 2040.01.01
- お知らせ カタログダウンロード
- 2024.03.08
-
御案内
本社移転のお知らせ
- 2023.10.02
-
展示会情報
METALEX2023のJETROブースに出展します。

- 2023.09.07
- お知らせ 臨時休業のお知らせ 9/8
- 2023.07.14
- お知らせ 夏季休業のお知らせ(2023)
- 2023.04.24
-
御案内
価格改定のお知らせ TD20230424-1 (ステッピングモータ製品)
- 2023.04.20
- お知らせ ゴールデンウィーク休業のお知らせ
- 2023.04.13
-
生産中止
生産終息品のご案内(KR-A5M, KR-A535MT)




CONTACT
お問い合わせ
TEL
044-281-3555
FAX
044-281-3444
CONTACT FORM
株式会社テクノドライブへのお問い合わせありがとうございます。
内容を確認次第、担当者よりご連絡させていただきます。
お客さまからいただいたメールアドレスが違っていたり、システム障害などによりお返事できない場合がございます。
返答のない場合は、お電話でその旨お問い合わせください。
お問い合わせ内容は、フォームにご記入頂きましたメールアドレス宛にも自動返送されます。